
Welcome!
I'm Maya, an AI researcher interested in the application of Machine Learning to unsolved problems in Science, as well as in a broad range of topics such as Self-Organisation, Collective Learning and Open-Endedness.
I'm currently working on AI for automated discovery in Science as a postdoctoral researcher at Syensqo and LoF-CNRS, where I develop curiosity-driven exploration methods for the discovery of novel chemical formulations. Before that I obtained my Ph.D. in Machine Learning under the supervision of Pierre-Yves Oudeyer and Clément Moulin-Frier at the FLOWERS team at Inria Bordeaux; together with the Poietis biotech company. During my Ph.D, I also worked with Dr. Michael Levin and his team at the Levin Lab at Tufts University.
Previously, I have been at University College of London where I completed my Master of Science (MSc) in computer vision and at Télécom Paristech where I did my Master of Engineering (MEng). I also spent a year as an AI research intern at Siemens Healthineers, Princeton N.J., working on deep learning and reinforcement learning algorithms for healthcare. My extended CV can be found here.
News:
- 09/2024: Very grateful to have received a best thesis award for my work, thank you CSS France!
- 07/2024: Excited to start exploring applications of curiosity-driven AI for chemistry at the LoF-CNRS lab 🧪
- 04/2024: New simple-foc-assistant tutorial to learn how to build a SimpleFOC AI Assistant with RAG
- 03/2024: New sketch-transformer tutorial to train transformers+MDN to generate human-like sketches
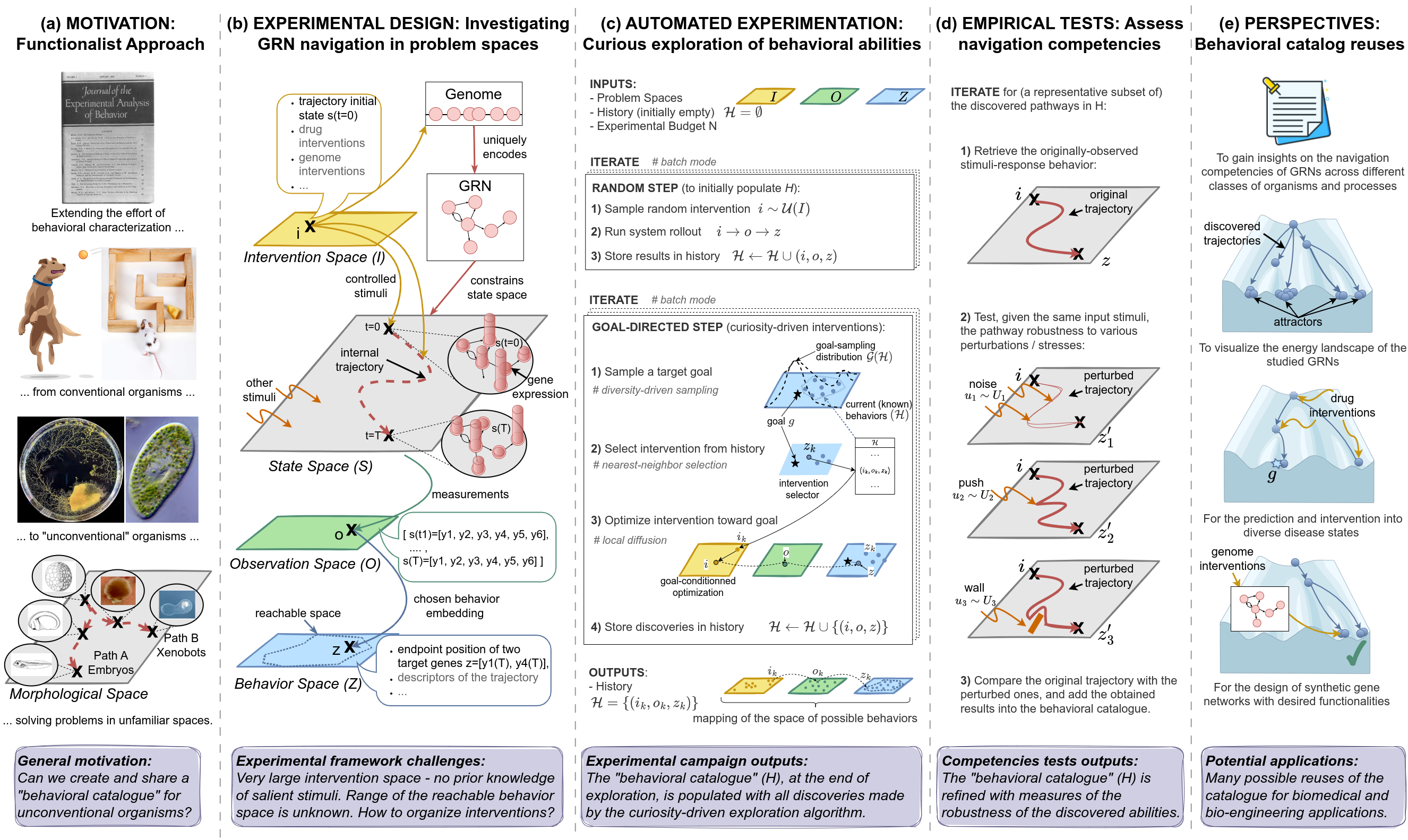
- 02/2024: Our paper about AI-driven discovery of GRN behaviors got accepted into the eLife journal
- 12/2023: Co-organized the Agent Learning in Open-Endedness Workshop held at NeurIPS 2023 🌱
- 11/2023: Defended my thesis "Curiosity-driven AI for Science: Automated Discovery of Self-Organized Structures". Thank you to my amazing jury Alan Aspuru-Guzik, Sebastian Risi, Melanie Mitchell, Jeff Clune, and Nicolas Brodu; and supervisors Pierre-Yves Oudeyer, Clément Moulin-Frier and Marc Nicodème 🙏
- 09/2023: New tutorial serie on how to use diversity search to explore behaviors of biological networks
- 07/2023: Our Flow Lenia paper won the best paper award at ALife 2023 conference 👾
Thesis:
Publications:

SBMLtoODEjax: Efficient Simulation and Optimization of Biological Network Models in JAX
AI for Science Workshop at NeurIPS 2023 (Poster)
| abstract | webpage | pdf | publication | code | documentation | tutorials |
Flow-Lenia: Towards open-ended evolution in cellular automata through mass conservation and parameter localization
ALIFE 2023 (Best Paper Award)
| abstract | webpage | pdf | publication | oral talk | code |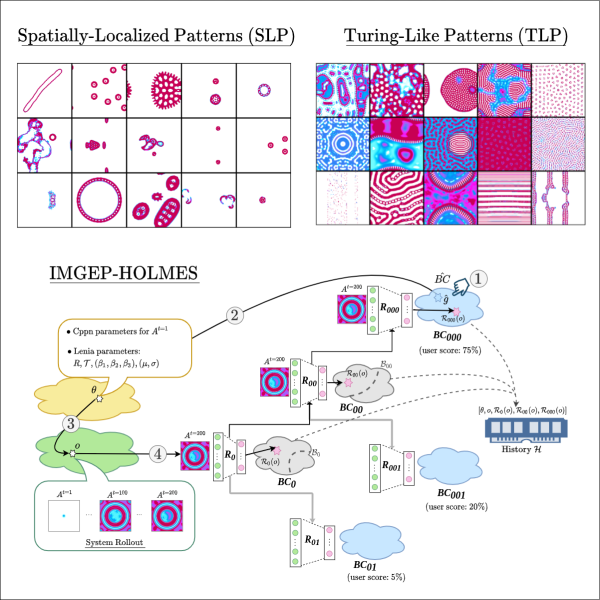
Hierarchically Organized Latent Modules for Exploratory Search in Morphogenetic Systems
NeurIPS 2020 (Oral presentation, top 1%)
| abstract | webpage | pdf | publication | poster | oral talk | code |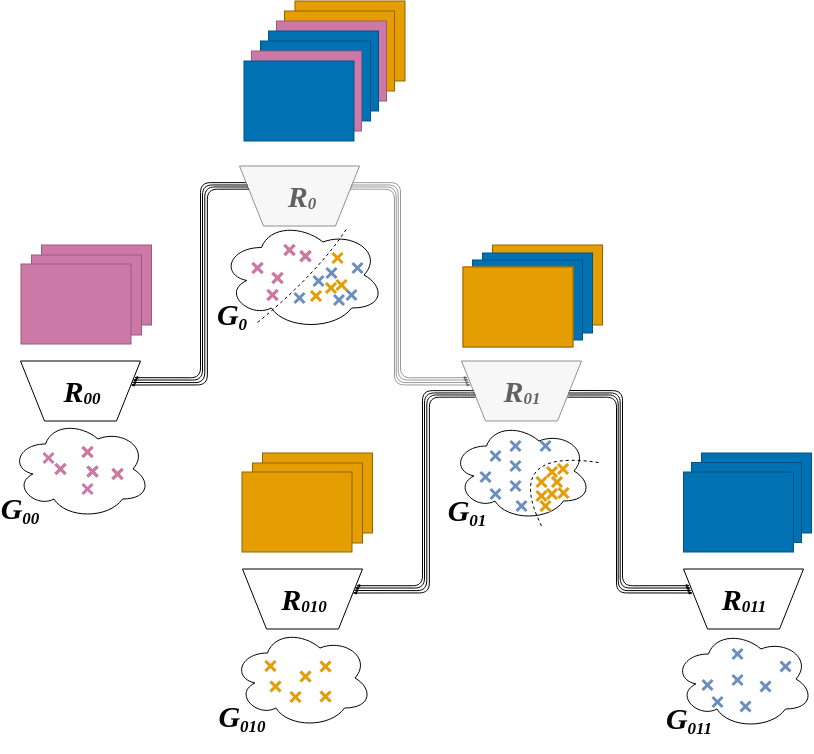
Progressive Growing of Self-Organized Hierarchical Representations for Exploration
Be-TR RL Workshop at ICLR 2020 (Poster)
| abstract | pdf | publication | oral talk |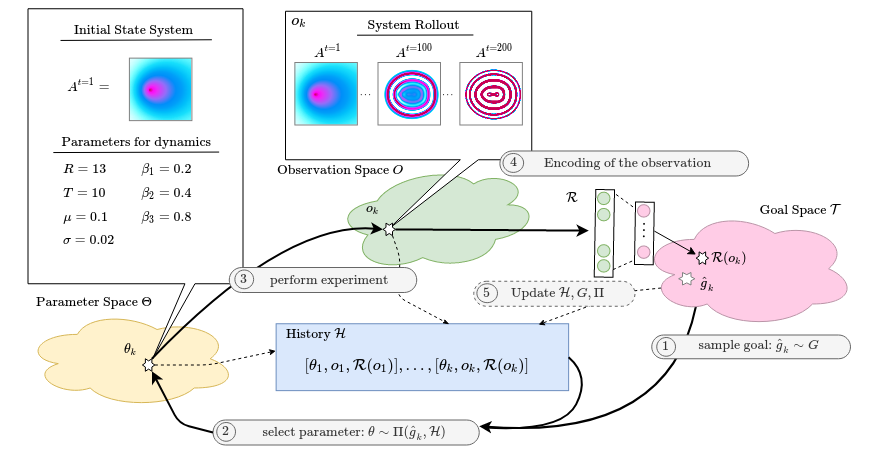
Intrinsically Motivated Exploration for Automated Discovery of Patterns in Morphogenetic Systems
ICLR 2020 (Oral presentation, top 2%)
| abstract | webpage | pdf | publication | oral talk | blog | code |
Nonlinear Adaptively Learned Optimization for Object Localization in 3D Medical Images
DLMIA workshop at MICCAI 2018, also abstract at MED-NEURIPS 2018 (Poster)
US Patent: https://patents.google.com/patent/US20190378291A1/en
| abstract | pdf | publication | poster |
Blog posts / Tutorials:
Building a SimpleFOC AI Assistant with RAG
Generate Human-like Sketches with Transformers
Diversity Search to Explore Biological Networks (tuto 2)
Diversity Search to Explore Biological Networks (tuto 1)
How to use SBMLtoODEjax (short tutorial series)
A conversation with Nicholas Guttenberg about my work
Learning Sensorimotor Agency in Cellular Automata
Meta-Diversity Search in Minecraft
Automated discovery in a continuous Game of Life